Company address: No.2, West Pingbu Avenue, Huadu District, Guangzhou, Guangdong Province




一、Product Overview
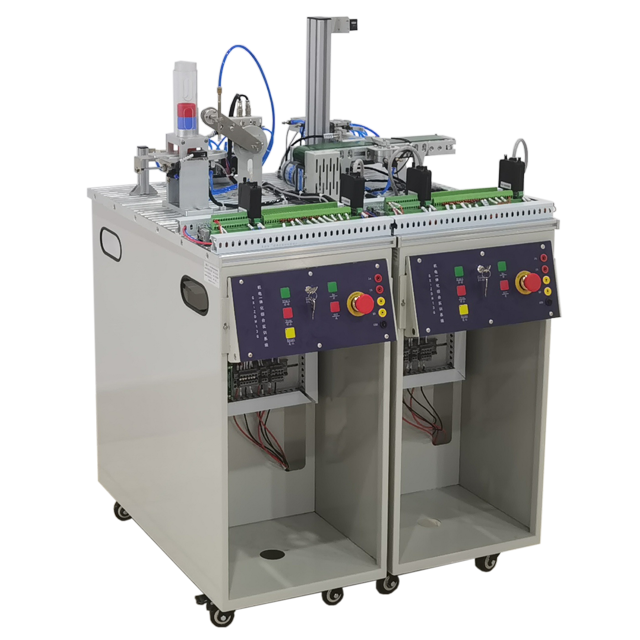
The device is composed of a feeding unit, a detection unit, a processing unit, a conveyor belt unit, a robotic arm unit, a finished product packaging unit, and other components. Each unit has a set of PLC control systems that can run "single machine/online" control, and has good flexibility. Suitable for comprehensive practical training in courses such as pneumatic technology, sensor technology, PLC programming technology, PLC network technology, position detection technology, electronic and electrical technology, mechanical assembly technology, etc. in various vocational colleges, secondary vocational schools, technical colleges, etc. In addition, this device can add robot units, assembly units, etc. to form a flexible machining and manufacturing system.
二、Technical parameters
1) Working power supply: single-phase three wire 220V ± 5% 50Hz;
2) Safety protection: leakage protection (operating current ≤ 30mA), overcurrent protection, fuse protection;
3) Boundary dimension: 2000mm × eight hundred × 1200mm (five stations in total);
4) Rated power: 2KW;
5) Environmental temperature: -10 ℃~40 ℃;
6) Relative humidity:<85%;
7) Equipment weight: 38Kg × 5。
三、Practical training projects
First stop
1. Installation and debugging of swinging cylinder
2. Installation and debugging of well type feeding mechanism
3. Debugging of photoelectric sensors
4. Writing of PLC program for feeding unit
5. Hardware debugging of the feeding unit
Second Station
1. Installation and debugging of laser ranging sensors
2. Compilation of analog program
3. Installation and debugging of pneumatic manipulator
4. Debugging of the three color sensor
5. Debugging of detection unit hardware
6. Writing of detection unit program
7. Installation and commissioning of conveyor belts
Third Station
1. Installation and debugging of rotating cylinder
2. Installation and commissioning of conveyor belts
3. Logic programming of pneumatic robotic arms
4. Debugging of flipping unit hardware
5. Compilation of flipping unit program
Fourth Station
1. Programming of pneumatic material retrieval robot
2. Installation and commissioning of conveyor belts
3. Installation and debugging of fiber optic sensors
4. Installation and debugging of suction cup fixture
5. Debugging of assembly unit hardware
6. Compilation of assembly unit program
Fifth Station
1. Installation and debugging of electric operators
2. Compilation of electric operator program
3. Installation and debugging of pneumatic gripper cylinder
4. Hardware debugging of the electric operator unit
5. Programming of the electric operator unit program
6. Online training
7. Online communication through PUT/GET commands
8. Online communication through PROFINET communication
9. Multi station data signal acquisition
10. Writing of multi-station online programs