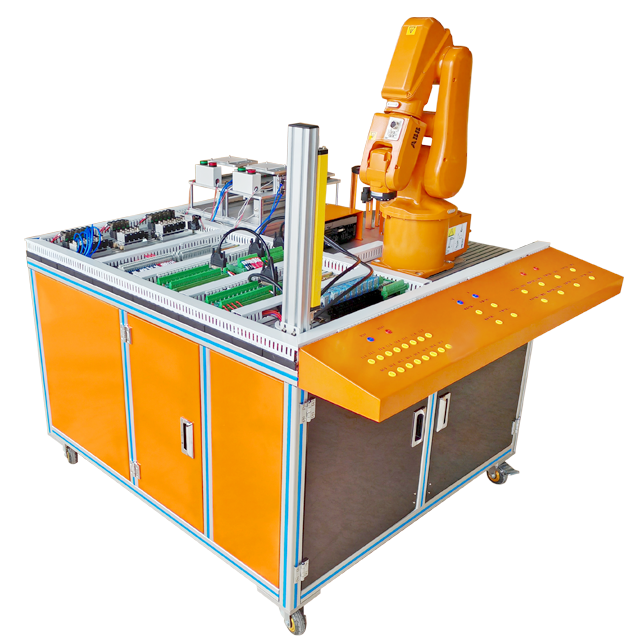
(一)IRB120本体:
1.具有6个自由度,串联关节型工业机器人;
2.工作范围覆盖0-580mm;
3.额定负载3kg;
4.重复定位精度不低于0.01mm;
5.安全性包括安全停、紧急停、2通道安全回路监测、3位启动装置;
6.集成信号源为手腕设10路信号;
7.集成气源为手腕设4路空气(5bar)。
(二)IRC5控制器:
8.采用先进的工业机器人控制软件;
9.采用高级工业机器人编程语言;
10.内置16路输入/16路输出的数字量I/O模块。
(三)ABB示教器:
11.图形化彩色触摸屏;
12.操纵杆;
13.热插拔,运行时可插拔。
(四)底座:
14.材料铝合金;
15.尺寸约260mm×260mm×15mm。